Gnosis Kit-of-parts / Partyhut
INVESTIGATORS: A. Scott Howe, (Co-I) as Kajima representative. Coordination for overall project: Mitsubishi Electric Corporation. Other investigators included representatives from Shimizu, Sumitomo Electric, Yamatake, Chiyoda, University of Tokyo, Tokyo Metropolitan University, Nara Institute of Science and Technology, Osaka University, National Center for Science Information Systems (NACSIS), and ASTEM RI from Japan. European Union representatives include Agence de la Productique (ADEPA), ILOG, ABB, Tehdasmallit Oy, Schroff, Tampere University of Technology, Ecole des Mines, d'Ales (EMA, Otto-von-Guericke-University of Magdeburg (IAF), Lulea University of Technology, DemoCenter, Fraunhofer Institute IPA, and Technical Research Centre of Finland VTT. EFTA Region representatives include Alusuisse, Swiss Federal Institute of Technology EPFL, and Swiss Federal Institute of Technology ETHZ. DME University of Canada was the representative from Canada region.
A. Scott Howe functioned as PI for a small fraction of the Gnosis project: to demonstrate a knowledge-based design tool concept for life-cycle management of kit-of-parts building systems.
FUNDING: US$10,000 (Dr. Howe's portion) funded through Kajima Corporation.
PERIOD: Apr 1999 - Mar 2000.
ABSTRACT:
Overall Gnosis project abstract:
This research is to establish the framework for a new manufacturing paradigm through use of knowledge-intensive strategies covering all stages of a product's life cycle, in order to realize new forms of highly competitive manufactured products and processes that are environment-conscious, society-conscious and human-oriented.
This project is grounded on the belief that local, reactive and uncoordinated remedies will not solve the problems faced by the present global manufacturing environment - problems that include environmental pollution, natural resource depletion and excessive waste. These problems will be solved only through a new, post-mass-production paradigm recognizing that resources are limited and that waste must be reduced throughout the entire life cycle of a product.
Such a post-mass-production paradigm would entail creating radically new types of products and modes of production, termed "soft" products and factories - meaning they are reconfigurable, robust, multi-functional, adaptable and reusable.
Research is therefore aimed at a shift from mass material use to mass knowledge application, from quantitative to qualitative satisfaction, and widening the scope of manufacturing to include the entire product life cycle.
In order to realize such products and methods, this project embraces studies to systematize knowledge on product design and manufacturing processes in general, with a view to making it available to all who wish to apply it effectively to the life cycle of a product manufactured anywhere throughout the world.
Work is also being done to establish a set of appropriate enabling technologies and methods of communication and knowledge sharing, across the boundaries of individual companies, technical domains, nations and time and space. Topics being developed for study, each with its own work package, include: 1) soft artifacts, 2) soft manufacturing (virtual manufacturing), 3) knowledge management, and 4) enabling technologies and integration.
Sub-abstract (managed by Dr. Howe):
The purpose of this research is to explore a kit-of-parts / object-oriented approach to building construction that falls under the “soft manufacturing” work package, that enables a post-mass-production paradigm to be applied to the construction industry. An example kit-of-parts system (named "Emerald") is developed that has flexibility for a wide range of configurations in structures, and establishes a life-cycle management scheme that will carry the building elements through the various phases of the building’s existence: design, manufacture, construction, occupancy, renovation, demolition, recycle, and disposal. The life-cycle management scheme is expressed in a demonstration known as The Partyhut -- a scenario taking the design of a simple structure through all the phases of its existence over a single weekend, embodying users, knowledge-bases, digital manufacturing technology, and robotic construction.
Other relevant links, images, and animations:
"Emerald" kit-of-parts definition (PDF)
Site design logic (PDF)
The Partyhut (abbreviated Flash version)

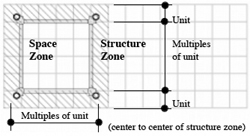 |
The kit-of-parts structure is organized in a way that is optimized for robotic assembly. Structure zones surround space zones, and each are multiples of a primitive unit. All kit-of-parts elements are designed to this unit as an underlying generic standard. |
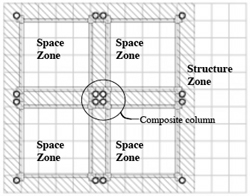 |
Each structural bay is isolated from its neighbor by the structure zones. Therefore when two zones are placed adjacent to each other, composite columns are created. These composite columns could be bundles of two, three, or four columns. The redundancy is necessary in order to give the construction robots autonomy for each bay, since lift-up technology is used to erect the structure. |
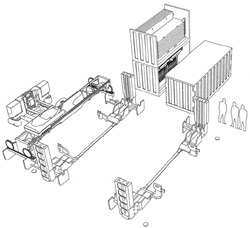 |
The suite of robots (see LDS BUILDING SYSTEM) consist of a bridge crane robot, a lifting robot, and a forklift robot. The suite of robots can adjust itself to all the bay sizes described in the "Emerald" kit-of-parts specification. The entire suite of robots fold into a single 20' shipping container, and deploy themselves over foundation sockets (foundation would be constructed conventionally). Nearby are containers with stacked panels ready for assembly.
The process for assembly is carried out in the following manner: a) forklift robot brings a pair of beams |
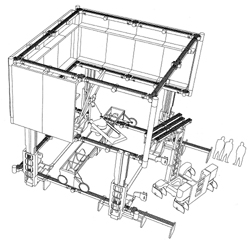 |
b) bridgecrane robot drops two beams in to place and will use those beams as tracks to run along the lenght of the bay. The beams interface flawlessly with the lift robot. c) forklift and bridgecrane work together to place columns, beams, panels, expandable space trusses, d) when entire structure for one bay is filled out, bridgecrane robot moves back out of the way to a parking position and the lift robot lifts the entire structure one story in height. Since the hardware must lift the entire structure, column redundancy is necessary, and the structure can only be built three or four stories high maximum. Structure zone gaps would later need to be filled manually with filler components. |
 |
The following scenario shows how a design expert system can assist a designer, and ultimately construct the building autonomously using the above robotic construction system.
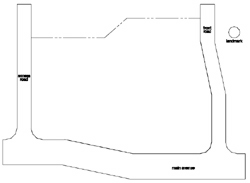
1) A site is chosen. |
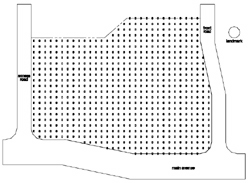 |
2) In the expert system, an arbitrary grid of zero values is generated from one of the plot boundaries. |
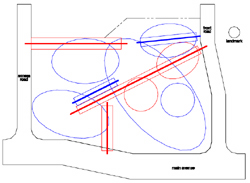 |
3) The designer uses four basic elements to show where structure needs to be placed: blue ovaloids show positive structure, red ovaloids show negative space, blue lines show positive hard walls or linear structure, and red lines show negative corridors. The designer can intuitively "squeeze" and rotate the elements at will. |
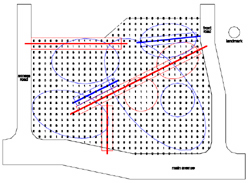 |
4) The expert system uses the elements as placed by the designer to assign values to the previously zeroed-out grid. Overlapping double blue ovaloids denote high density structure, etc. |
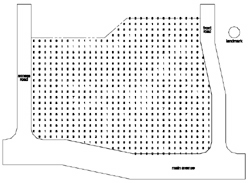 |
5) The numeric values on the site represent probability for the location of structure. These values will be used as input into an emergence system that will use genetic algorithms to sift through hundreds of variations of structure until fitness is achieved. |
 |
6) The designer helps determine fitness by changing the previous ovaloids into spatial types, and adjusting adjacencies and orientations. |
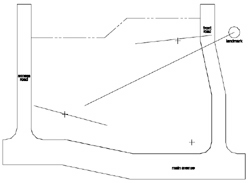 |
7) The designer will also input axes that could be important for views, access, etc. |
 |
8) Finally the expert system generates a series of blocks through emergence that represent structural bays. The blocks conform with the space zone / structure zone pattern, so the robotic construction system can erect the entire structure autonomously.
This system is only for generic orthogonal structure -- other shaped structures would need to be added manually. |
A.S. Howe (May 2003). Kit-of-parts and Automated Construction. Times Journal of Construction & Design, Vol 2 Issue 9. May 2003. Bennett, Coleman & Co. Mumbai, India.
A.S. Howe (2001). Automated construction and the power of the designer. In P. Telang (Chair), E-Space. Architecture / Engineering / Construction (AEC) workshop held in Mumbai, India.