TRIGON Self-assembling Structures
INVESTIGATORS: A. Scott Howe (PI).
FUNDING: Supported by NASA Ames Research Center.
PERIOD: 2003 - 2006.
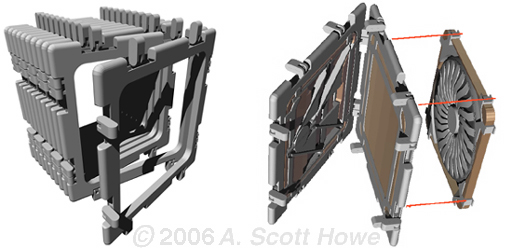
ABSTRACT: This research explores the feasibility of a self-assembling modular robotic panel-based constructiong system for mobility and self-construction. The Transformable Robotic Infrastructure-generating Object Network (TRIGON) system has been conceived for use on the surface of the Moon, Mars, and other planetary bodies. The self-constructing / self-reconfiguring intelligent modular robotic construction system can be used to assemble a variety of planetary surface structure configurations, for both habitats and vehicles, and integrates mobility systems. The panels in the system can “tumble” across existing structure in order to relocate themselves at different locations in the structure. Trigon units can piggyback and carry away other units, allowing for self-repair and disposal of obsolete units. The system can be stored in a compact form for shipping, and deployed into self-leveling rigid structures.
A compact stack of panels with core payloads can be delivered to the Moon's surface in a tight package with low mass penalty. Upon landing, the integrated mobility systems can relocate the package to a target site, and the self-assembling Trigon panels can configure themselves into a variety of structures, such as habitat, rover, or other infrastructure element. In-situ materials can be added for radiation shielding, and the resulting structure would be of a much greater volume than would be possible with the original package as delivered. An inflatable lining can be deployed as a pressure vessel.
The modular grid structure of the system represents a known environment within which panels can autonomously traverse to relocate themselves. Therefore any self-assembly or reconfiguration that occurs within the system has the options of being completely autonomous, teleoperated from earth, or directed locally by astronaut crews. Package delivery, surface mobility, and other activities that require interaction of the system with the surrounding environment would be facilitated by plug-in sensors and vision systems and could also be autonomous, teleoperated from earth, or directed locally.
Upon completion of the mission, a structure would be able to disassemble itself and relocate to a new location autonomously (or via remote teleoperation) after the crew departs. Alternatively, the panels could reconfigure themselves into a new configuration, habitat, or vehicle.
Other relevant links, images, and animations:
Trigon system summary (PDF)
Trigon robotic pair vertical climbing sequence animation ()

A.S. Howe; I. Gibson (2006). Trigon Robotic Pairs (AIAA 2006-7407). AIAA Space 2006 Conference & Exhibition. San Jose, California, USA, 19-21 September 2006. Reston, Virginia, USA: American Institute of Aeronautics and Astronautics.
A.S. Howe; I. Gibson (2006). Trigon Panel Size Optimization Studies (AIAA 2006-7328). 2nd International Space Architecture Symposium. San Jose, California, USA, 19-21 September 2006. Reston, Virginia, USA: American Institute of Aeronautics and Astronautics.
A.S. Howe; I. Gibson (2006). MOBITAT2: A Mobile Habitat Based on the Trigon Construction System (AIAA 2006-7337). 2nd International Space Architecture Symposium. San Jose, California, USA, 19-21 September 2006. Reston, Virginia, USA: American Institute of Aeronautics and Astronautics.
A.S. Howe (Feb 2006). Cassette Factories and Robotic Bricks: a Roadmap for Establishing Deep Space Infrastructures (SAE 2005-01-2911). 2005 Transactions Journal of Aerospace, pp330-363. ISBN 0-7680-1687-8. Warrendale, PA: Society of Automotive Engineers.
A.S. Howe (2004). Cubolding and Trigons: Modular Robotic Construction Systems. Proceedings of the Robosphere 2004 conference. 9 - 10 November 2004, NASA Ames Research Center, Palo Alto, California.
A.S. Howe; S. Colombano (2004 May 20). Self-constructing / Self-reconfiguring Modular Construction Systems. White paper, submitted in response to the NASA Exploration Systems Enterprise, Request for Information RFI04212004.
W. Yip; A.S. Howe (2003 September). Deployable Secondary Support Structures for Planetary Construction (AIAA 2003-6282). AIAA Space 2003 Conference & Exposition, Long Beach, California, USA, 23-25 September 2003. Reston, Virginia, USA: American Institute of Aeronautics and Astronautics.