MOBITAT Mobile Modular Habitat
INVESTIGATORS: A. Scott Howe (PI), Jeffrey W. Howe (Co-I).
FUNDING: Supported by NASA Ames Research Center.
PERIOD: 2003
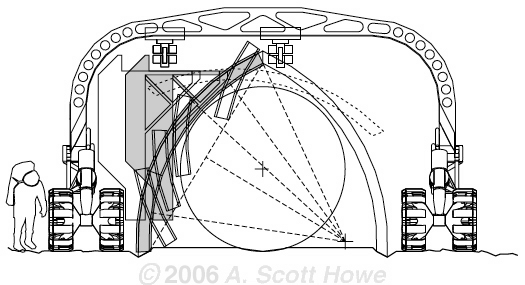
ABSTRACT: This research explores a concept for an autonomous planetary lander with mobility systems that can function singly as a rover or link up with other modules to form a habitat. The Mobitat (roughly based on, and inspired by, the Mankins "Habot" concept) consists of three major components: a) a descent engine jettisoned upon landing, b) a highly maneuverable multi-use robotic mobility platform, and c) detachable modular construction and robotic elements, including habitat pressure vessels.
Multiple Mobitat landers will land autonomously on the surface at safe distances from each other and traverse an obstacle-strewn landscape to congregate at a single target location. Modules can dock together to form a larger base awaiting crew arrival. After mission completion and departure of the crew, the modules can detach and relocate themselves to another location. A Mobitat can also be piloted by crew members directly or through teleoperation, allowing them to function as highly maneuverable pressurized rovers, making dedicated pressurized rovers unneccessary. Additionally, the modules are detachable, allowing the mobility platform to be used by itself for other tasks using plug-in robotic implements.
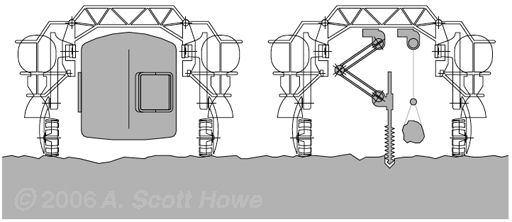
The Mobitat concept follows on the Parametric Habitat inflatable pressure vessel concept, which also uses a detachable mobility platform as a lander and automated assembly implement. In the Parametric concept, the mobility platform would land with four modules packed under the platform superstructure. The platform would traverse terrain to the target location, and autonomously set up the four habitat modules by dropping each into position and affecting inflation to fill out the form. Once the modules were in place and inflated, the mobility platform would employ a simple autonomous sandbagger implement attached to the superstructure that would scoop regolith, fill sandbags, and cover the modules with layer by layer of sandbag shielding.
Both the Mobitat and Parametric Habitat concepts were intended to be preliminary investigations leading to further discussions and concepts. The Parametric Habitat was an introductory project matching terrestrial automated construction concepts with construction in extreme space environments, and the Mobitat project expanded on those findings and matched the automated construction technology with the "Habot" surface habitat concept.
Other relevant links, images, and animations:
Mobitat white paper (PDF)
Mobitat engine deploy animation (1.5mb)
Mobitat mobility system deploy animation (2.4mb)
A.S. Howe; J.W. Howe (2005). Plug-in hardware concepts for mobile modular surface habitats (AIAA 2005-2673). 1st Exploration Conference: Continuing the Voyage of Discovery. Orlando, Florida, USA, 30 January – 1 February 2005. Reston, Virginia, USA: American Institute of Aeronautics and Astronautics.
A.S. Howe; J.W. Howe (2004). Mobitat: Modular Mobile Habitat. Proceedings of the Robosphere 2004 conference. 9 - 10 November 2004, NASA Ames Research Center, Palo Alto, California.
A.S. Howe; J.W. Howe (2004 May 20). Mobitat: Mobile Planetary Surface Bases. White paper, submitted in response to the NASA Exploration Systems Enterprise, Request for Information RFI04212004.
Y. Lai; A.S. Howe (2003). A Kit-of-parts Approach to Pressure Vessels for Planetary Surface Construction (AIAA 2003-6281). AIAA Space 2003 Conference & Exposition, Long Beach, California, USA, 23-25 September 2003. Reston, Virginia, USA: American Institute of Aeronautics and Astronautics.
A.S. Howe; J.W. Howe (2000). Applying Construction Automation Research to Extraterrestrial Building Projects (SAE 2000-01-2465). Proceedings of the 30th International Conference on Environmental Systems (ICES2000), 10-13 July 2000, Toulouse, France. 400 Commonwealth Drive, Warrendale, PA: Society of Automotive Engineers.