Birdhouse Robotic Assembly
INVESTIGATORS: A. Scott Howe (PI), assisted by A. Chihiro Howe and Musashi W. Howe.
FUNDING: Supported by the Executive Committee Birdhouse Project (a volunteer collaborative of private companies and organizations based in Osaka, Japan).
PERIOD: 2001.
ABSTRACT: This research begins with a simple set of requirements, which are to design a birdhouse collective, and develops a means to assemble the units using robotic hardware. The Birdhouse Project team regularly chooses a topic and invites specialists who are expert on that topic to design a birdhouse according to their training and expertise. The project uses the medium of birdhouses (that have a simple set of requirements) to comment on and express current human-interest issues. In the past topics have included "architects", "yacht designers", "car designers", "space architects", and "airport designers". This biannual event is high profile in Japan and includes past entries from Tadao Ando and Sir Norman Foster. The current invited entry fell under the topic of "Artificial Intelligence Creator-designed Birdhouses", where designers and engineers devise birdhouse concepts related to AI and artificially produced machine intelligence.
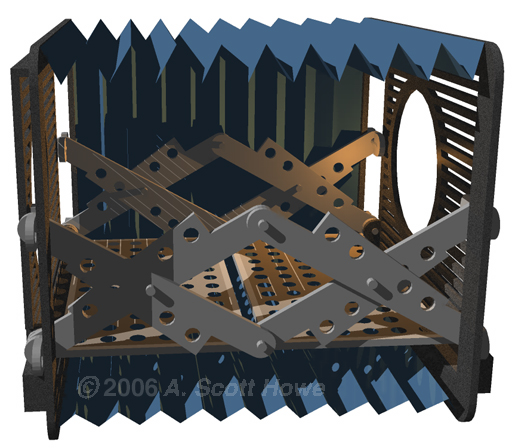
This invited entry is an automated construction system that installs deployable birdhouses in a support / infill frame, similar to branches on a tree trunk. Modules are stacked with their exterior envelopes consisting of collapsed accordion-style membranes, and are neatly lined up on a track to one side of the support structure. One by one the collapsed modules are autonomously fed into a gap between the two main bays, and alternatively, right-facing and left-facing robots carry them to their proper slot in the frame, and pinch the operator ends of a scissor truss. This causes the modules to expand into the slot. As the right-facing robot moves back down the gap empty, it avoids the left-facing robot which is rising in the gap carrying the next collapsed module. In this way the two robots pass each other alternatively moving up and down the gap delivering modules to their proper slot.
Other relevant links, images, and animations:
Expanding module animation (868kb)
Construction animation (4.2mb)
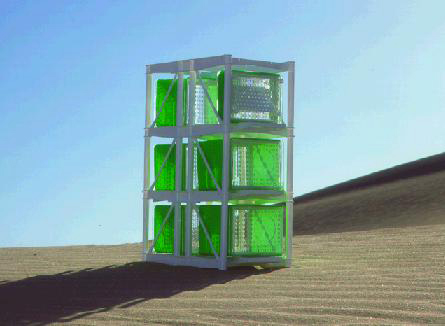
(Photo by the Birdhouse Project team)
A.S. Howe (2003). AI Creator-designed Birdhouses: Birdhouse Condo. The Birdhouse Project vol 6. http://www.birdhouse.gr.jp