LDS Robotic Construction System
INVESTIGATORS: A. Scott Howe (PI), assisted by student Greg Steffensen.
FUNDING: Supported by Kajima Corporation.
PERIOD: 1994.
ABSTRACT: This research develops a concept The system is joint-based, where a standard joint is utilized for all connections. The building parts can be assembled or unassembled by hand without tools, and can be arranged into any configuration on any site. Since power and communication lines are integrated into the joint, they automatically connect when the joints are structurally secured. An automated construction system prepared for the kit-of-parts includes three construction robots which fold up together into a shipping container that can be delivered to remote flat sites and assemble the building system automatically for most configurations. The concepts embodied in the LDS Building System was later extended in the "Yukigen" temporary life-cycle architecture research, where the elements that make up temporary kit-of-parts buildings are tracked through the entire lifecycle of the project for production and recycle, so there is no waste at the end. The LDS Building System was also featured in the IMS GNOSIS research, and applied to temporary structure featured in THE PARTYHUT.
Other relevant links, images, and animations:
LDS Building System white paper (PDF)
Robot suite setup animation (840kb)
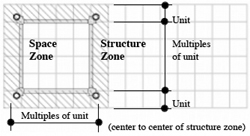 |
The kit-of-parts structure is organized in a way that is optimized for robotic assembly. Structure zones surround space zones, and each are multiples of a primitive unit. All kit-of-parts elements are designed to this unit as an underlying generic standard. |
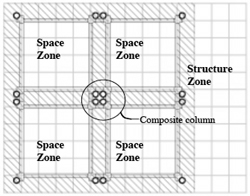 |
Each structural bay is isolated from its neighbor by the structure zones. Therefore when two zones are placed adjacent to each other, composite columns are created. These composite columns could be bundles of two, three, or four columns. The redundancy is necessary in order to give the construction robots autonomy for each bay, since lift-up technology is used to erect the structure. |
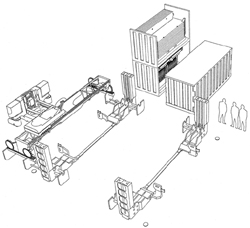 |
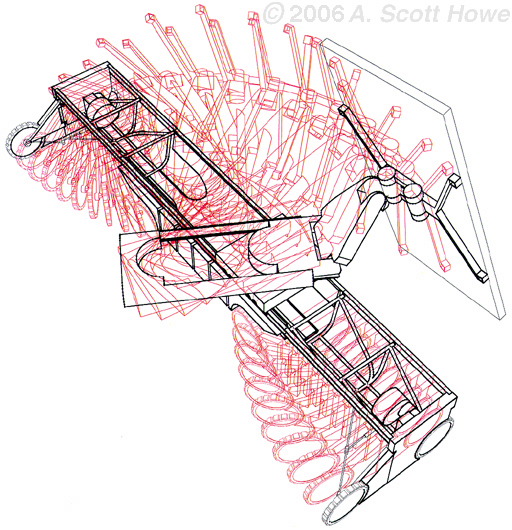
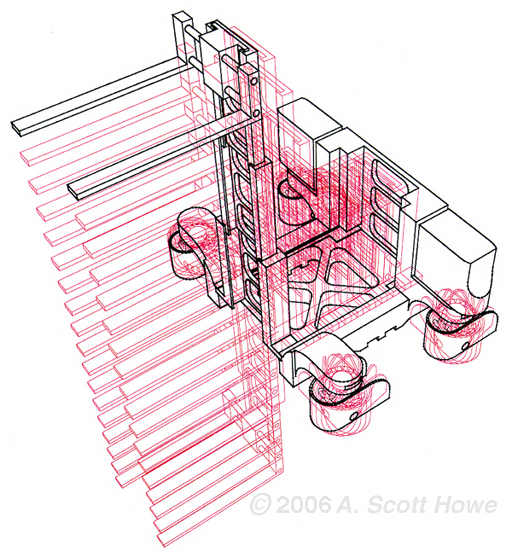
The suite of robots consist of a bridge crane robot, a lifting robot, and a forklift robot. The suite of robots can adjust itself to all the bay sizes described in the "Emerald" kit-of-parts specification. The entire suite of robots fold into a single 20' shipping container, and deploy themselves over foundation sockets (foundation would be constructed conventionally). Nearby are containers with stacked panels ready for assembly. The process for assembly is carried out in the following manner: a) forklift robot brings a pair of beams |
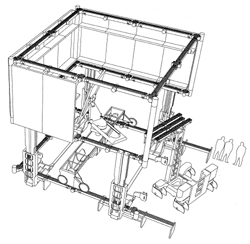 |
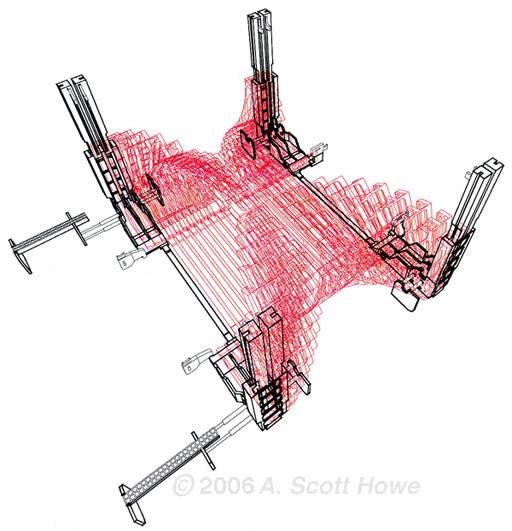
b) bridgecrane robot drops two beams in to place and will use those beams as tracks to run along the lenght of the bay. The beams interface flawlessly with the lift robot. c) forklift and bridgecrane work together to place columns, beams, panels, expandable space trusses, d) when entire structure for one bay is filled out, bridgecrane robot moves back out of the way to a parking position and the lift robot lifts the entire structure one story in height. Since the hardware must lift the entire structure, column redundancy is necessary, and the structure can only be built three or four stories high maximum. Structure zone gaps would later need to be filled manually with filler components. |
A.S. Howe (2003). Design Principles for Kinematic Architecture. Proceedings of the Second International Conference on Construction in the 21st Century (CITC-II). 10-12 December, 2003, Hong Kong.
A.S. Howe (2002 October). The Ultimate Construction Toy: Applying Kit-of-Parts Theory to Habitat and Vehicle Design (AIAA 2002-6116). 1st Space Architecture Symposium (SAS 2002), Houston, Texas, USA, 10-11 October 2002. Reston, Virginia, USA: American Institute of Aeronautics and Astronautics.
A.S. Howe (2001). Automated construction and the power of the designer. In P. Telang (Chair), E-Space. Architecture / Engineering / Construction (AEC) workshop held in Mumbai, India.
A.S. Howe (2000). Designing for Automated Construction. Automation in Construction 9, 3, 259-276.
A.S. Howe; I. Ishii; T. Yoshida (1999). Kit-of-parts: A review of object-oriented construction techniques. Proceedings of the International Symposium on Automation and Robotics in Construction (ISARC16). 22-24 September 1999, Madrid, Spain. London: International Association for Automation and Robotics in Construction (IAARC).
A.S. Howe (1998). A new paradigm for life-cycle management of kit-of-parts building systems. (Doctoral Dissertation, University of Michigan, 1998). University Microfilms International, No. 9909905.
A.S. Howe (1998). Jidoka Seko wo mezashita Kenchiku Design (Architectural Design Addressing Automated Construction Processes). Dai 12 Kai Kenchiku Seko Robot Symposium (12th Symposium on Architectural Construction Robotics), pp.1-8. Tokyo, Japan: Nihon Kenchiku Gakkai Kenchiku Seisan Jidoka Shoiinkai- (Architectural Institute of Japan Research Committee on Architectural Manufacturing Automation).