Robotic Construction
OBJECTIVES: All studios and courses taught by Dr. Howe under the Construction / engineering theme rigorously conform with National Architectural Accrediting Board (NAAB) Condition 13 Criterion 7 "Collaborative Skills", Criterion 15 "Sustainable Design", Criterion 18 "Structural Systems", Criterion 19 "Environmental Systems", Criterion 21 "Building Envelope Systems", Criterion 22 "Building Service Systems", Criterion 23 "Building Systems Integration", and Criterion 24 "Building Materials and Assemblies". Dr. Howe also emphasizes a link with Criterion 3 "Graphic Skills", Criterion 4 "Research Skills", Criterion 5 "Formal Ordering Systems", and Criterion 6 "Fundamental Design Skills".
INPUT / CONSTRAINTS:
- Grammatical approach to design, kit-of-parts design.
- Assembly should be optimized for machine assembly rather than human hands.
OUTPUT / DELIVERABLES:
- Building designs that include assembly process as well as their final configuration.
- Robotic and self-assembly schemes.
- Automated material handling schemes.
EXAMPLE STUDENT WORK:
Paul Chau (HKU, MArch thesis, 2001-02) developed a support / infill highrise scheme that has a frame around the outside of a square atrium (figure 1). On each side of the square one bay was set aside to be a large elevator lift for bringing up modules to each floor (figure 2).

Figure 1: Robotic construction lifts by Paul Chau

Figure 2: Each side of square has oversized lift for carrying modules and passengers
While still in his second year, Marco Tsun Fai Chan (HKU, arch2013 2nd year design studio, 2000-01, co-tutors Dr. Howe and Elantha Evans) developed a self-constructing scheme that could be built in a narrow sit in Hong Kong where larger equipment cannot access (figure 3). The scheme consists of a support frame with built-in cranes that lift modules to the correct floor, after which they slide into their target location. The modules are a kit-of-parts infill system (figure 4).

Figure 3: Self-constructing building by Marco Tsun Fai Chan
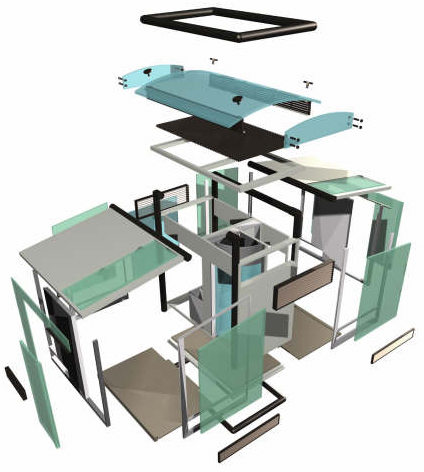
Figure 4: Marco's kit-of-parts infill system
Christina Hoi Ling Poon (HKU, arch2013 2nd year design studio, 2004-05), also a second year undergraduate, designed a system where the entire structure is an overhead crane that inserts modules into an automated warehouse-like set of "pigeon holes" (figure 5). After the construction is complete, the same system inserts automobiles into a separate set of "pigeon holes" to facilitate parking for the building (figure 6).
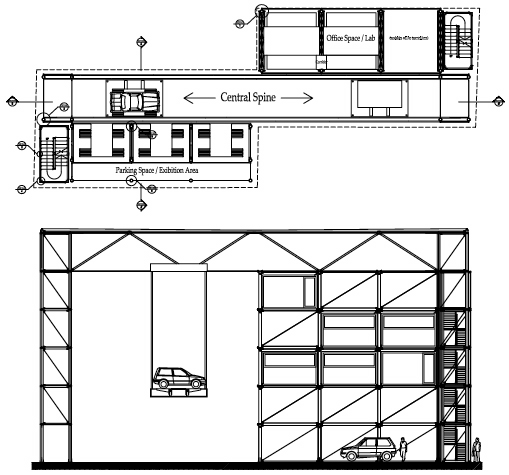
Figure 5: Automated warehouse technology for construction by Christina Hoi Ling Poon
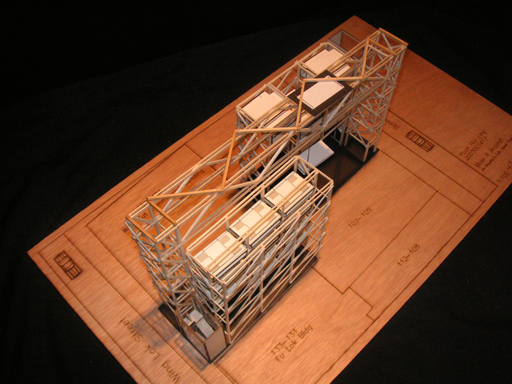
Figure 6: Parking and relocatable office modules
Jamie Yick (HKU, MArch thesis, 2003-04, co-tutors Dr. Howe and Dr. Alex Amato) developed a concept for a "superbay" container yard, where dwelling units are stacked several stories high inside each superbay (figure 7). A highrise structure would then consist of multiple superbays with erecting cranes available at each level (crane hardware could be relocated from level to level).
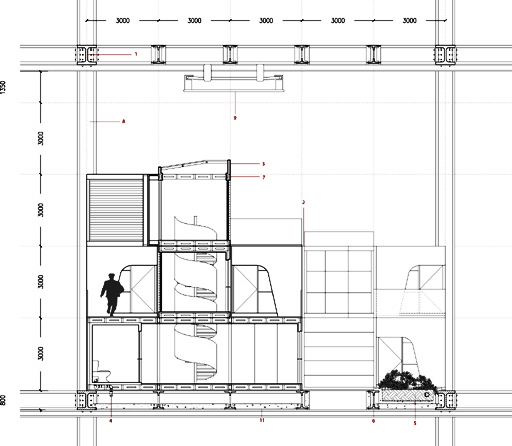
Figure 7: Container yard superbay by Jamie Yick