TRIGON Projects (2006)
CLIENT: NASA Ames Research Center.
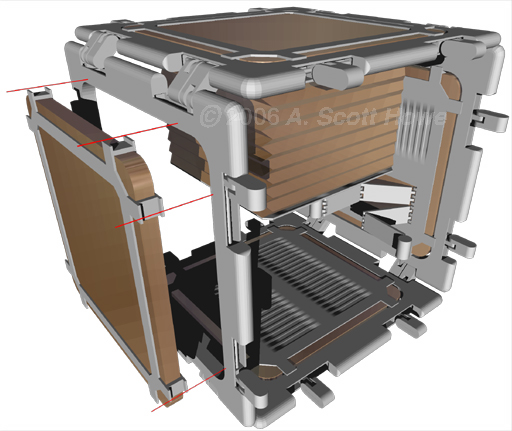
CONCEPT: The Trigon System is a modular robotic construction system capable of self-assembly and mobility. The term "Trigon" comes from "triangle + polygon" but also is an acronym for Transformable Robotic Infrastructure-Generating Object Network. Trigon panels are fully capable of self-assembly from a compact stack of partially connected panels. In addition, secondary functionality can be incorporated into the panels by the use of special plug-in payloads that are carried by the panels in the process of self-assembly.
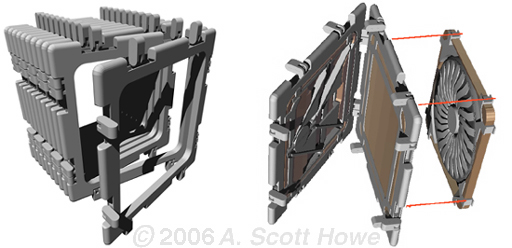
An equilateral triangle primitive combined with a square primitive can be used to create thousands of stable structural configurations. The flexibility of the Trigon system comes from the uniformity of the edge lengths, and the way connection via corners is avoided. Using the stacking ability, the Trigon panels can be pre-assembled into a variety of pre-determined structures and flattened out (with a few key edges temporarily separated). Advanced planning for folding can allow these flattened structures to be stacked into a compact space, and "unfurled" at the time of deployment.
The self-constructing Trigons also have the capacity to climb previously assembled portions of the structure. The system consists of triangular or square panels that when assembled can create trusses and other structural elements. Computer controlled revolute actuators at the panel edges affect precision motion relative to the panel body, allowing it to swing end over end along the completed structure. As the free end is swung around and approaches the structure surface, the connectors are moved inward. Once the connectors enter the clasping area of the existing structure, an outward pressure is applied and a firm connection is established. At this point the previous fixed end can now release, and the end over end motion is repeated until the panel finds its own place in the uncompleted structure.
DESIGN TEAM: Trigon system design, engineering, development, and manufacture by A. Scott Howe. All habitats and vehicles designed by A. Scott Howe. Collaborators include Ian Gibson (National University of Singapore) and Silvano Colombano (NASA Ames Intelligent Robotics Group).
COST: None estimated.
DATE: 2006.
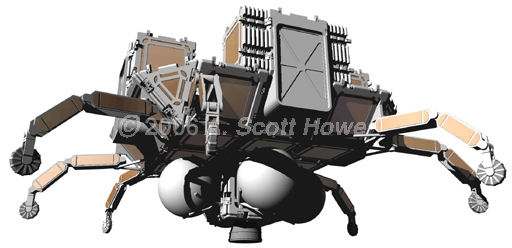
STATUS: Robotic construction system is fully engineered for self-assembly and cooperative autonomous behavior, with working prototypes. Habitats and vehicles are only preliminary as of this writing.
Other images and animations:
Trigon concept summary (PDF)
automated panel placement animation (5.8mb)
automated assembly animation of rover (coming soon)
legged habitat "Mobitat2"
wheeled habitat
cassette factory
{kind=link}
{kind=link}
{kind=link}


A.S. Howe (2006). The Ultimate Construction Toy: Applying Kit-of-Parts Theory to Habitat and Vehicle Design. In A,S. Howe et.al. (eds.) AIAA Progress in Astronautics series “Space Architecture: Paradigms for Habitable Space Environments”. Reston, Virginia, USA: American Institute of Aeronautics and Astronautics.
A.S. Howe; I. Gibson (2006). Trigon Robotic Pairs (AIAA 2006-7407). AIAA Space 2006 Conference & Exhibition. San Jose, California, USA, 19-21 September 2006. Reston, Virginia, USA: American Institute of Aeronautics and Astronautics.
A.S. Howe; I. Gibson (2006). Trigon Panel Size Optimization Studies (AIAA 2006-7328). 2nd International Space Architecture Symposium. San Jose, California, USA, 19-21 September 2006. Reston, Virginia, USA: American Institute of Aeronautics and Astronautics.
A.S. Howe; I. Gibson (2006). MOBITAT2: A Mobile Habitat Based on the Trigon Construction System (AIAA 2006-7337). 2nd International Space Architecture Symposium. San Jose, California, USA, 19-21 September 2006. Reston, Virginia, USA: American Institute of Aeronautics and Astronautics.
A.S. Howe (Feb 2006). Cassette Factories and Robotic Bricks: a Roadmap for Establishing Deep Space Infrastructures (SAE 2005-01-2911). 2005 Transactions Journal of Aerospace, pp330-363. ISBN 0-7680-1687-8. Warrendale, PA: Society of Automotive Engineers.
A.S. Howe (2004). Cubolding and Trigons: Modular Robotic Construction Systems. Proceedings of the Robosphere 2004 conference. 9 - 10 November 2004, NASA Ames Research Center, Palo Alto, California.
A.S. Howe; S. Colombano (2004 May 20). Self-constructing / Self-reconfiguring Modular Construction Systems. White paper, submitted in response to the NASA Exploration Systems Enterprise, Request for Information RFI04212004.
W. Yip; A.S. Howe (2003 September). Deployable Secondary Support Structures for Planetary Construction (AIAA 2003-6282). AIAA Space 2003 Conference & Exposition, Long Beach, California, USA, 23-25 September 2003. Reston, Virginia, USA: American Institute of Aeronautics and Astronautics.