MOBITAT Mobile Planetary Surface Habitat (2003)
CLIENT: NASA Ames Research Center.
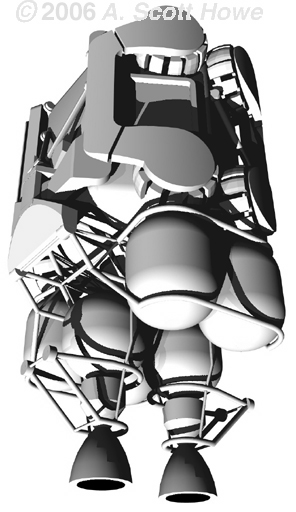
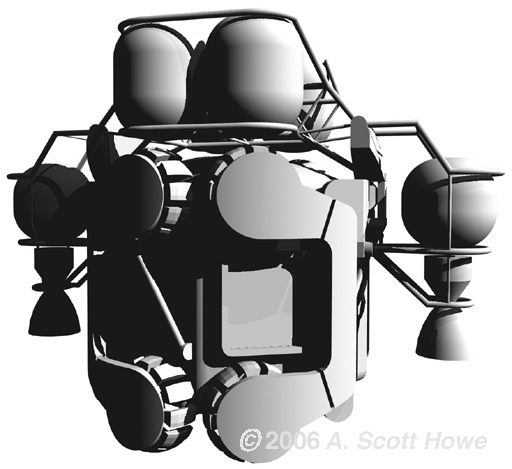
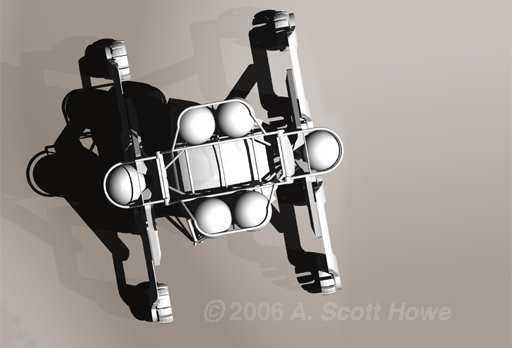
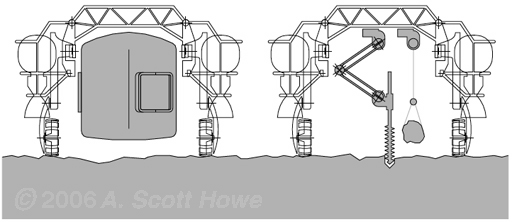
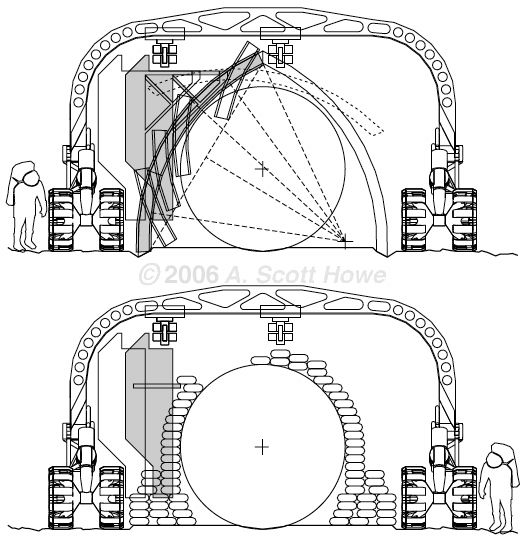
CONCEPT: The Mobitat (roughly based on, and inspired by, the Mankins "Habot" concept) consists of three major components: a) a descent engine jettisoned upon landing, b) a highly maneuverable multi-use robotic mobility platform, and c) detachable modular construction and robotic elements, including habitat pressure vessels.
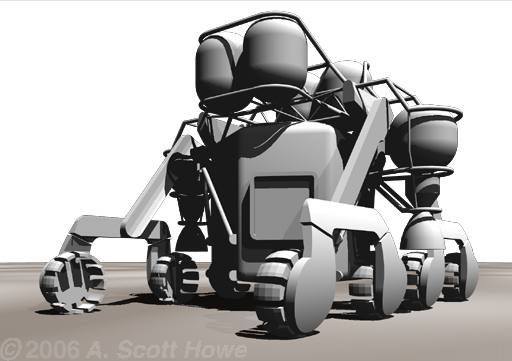
Multiple Mobitat landers will land autonomously on the surface at safe distances from each other and traverse an obstacle-strewn landscape to congregate at a single target location. Modules can dock together to form a larger base awaiting crew arrival. After mission completion and departure of the crew, the modules can detach and relocate themselves to another location. A Mobitat can also be piloted by crew members directly or through teleoperation, allowing them to function as highly maneuverable pressurized rovers, making dedicated pressurized rovers unneccessary. Additionally, the modules are detachable, allowing the mobility platform to be used by itself for other tasks using plug-in robotic implements.
DESIGN TEAM: Preliminary design, kinematic functionality, mobility systems, deployable structures, and habitat design by A. Scott Howe with feedback from Jeffrey W. Howe.
COST: None estimated.
DATE: 2003.
STATUS: This project was a quick sketch study for discussion purposes, not meant to be a final design. Only conceptual design steps were taken, as a wheeled alternative to NASA's Habot mobile modular lunar habitat. The design has generated a lot of interest and discussion as intended, and was the subject of a proposed multi-center research team proposal, including experts from NASA Ames, Jet Propulsion Laboratory, Johnson Space Center, Langley, and Hamilton Sundstrand.
Other images and animations:
engine deploy animation (1.5mb)
mobility system deploy animation (2.4mb)
in compact form for payload bay
lander mode
Mobitat functionality brief (PDF)
{kind=link}
{kind=link}
A.S. Howe; J.W. Howe (2005). Plug-in hardware concepts for mobile modular surface habitats (AIAA 2005-2673). 1st Exploration Conference: Continuing the Voyage of Discovery. Orlando, Florida, USA, 30 January – 1 February 2005. Reston, Virginia, USA: American Institute of Aeronautics and Astronautics.
A.S. Howe; J.W. Howe (2004). Mobitat: Modular Mobile Habitat. Proceedings of the Robosphere 2004 conference. 9 - 10 November 2004, NASA Ames Research Center, Palo Alto, California.
A.S. Howe; J.W. Howe (2004 May 20). Mobitat: Mobile Planetary Surface Bases. White paper, submitted in response to the NASA Exploration Systems Enterprise, Request for Information RFI04212004.
Y. Lai; A.S. Howe (2003). A Kit-of-parts Approach to Pressure Vessels for Planetary Surface Construction (AIAA 2003-6281). AIAA Space 2003 Conference & Exposition, Long Beach, California, USA, 23-25 September 2003. Reston, Virginia, USA: American Institute of Aeronautics and Astronautics.