LDS Robotic Building System (1994)
CLIENT: Presented to The Church of Jesus Christ of Latter-day Saints (Mormon), an international religious organization. Provided early inspiration for Pllug-in Creations design philosophy.
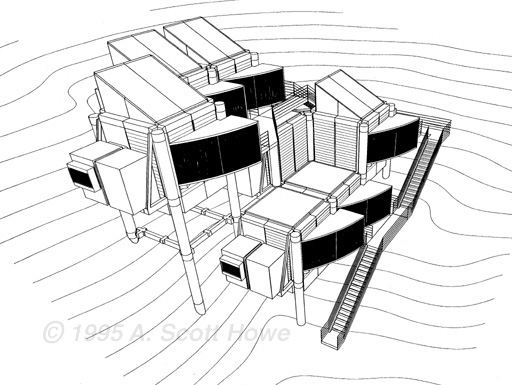
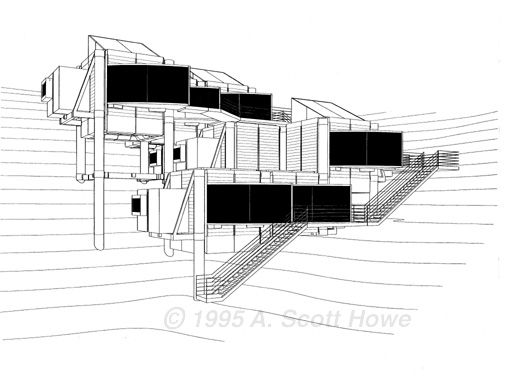
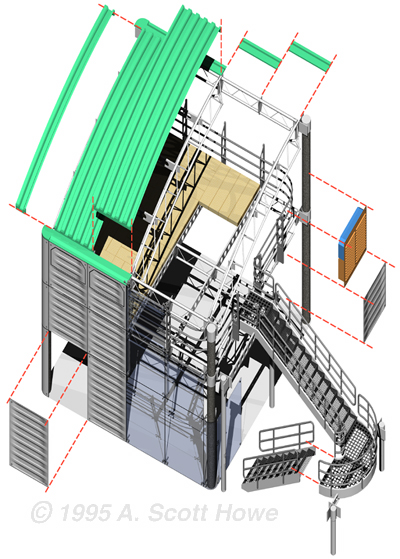
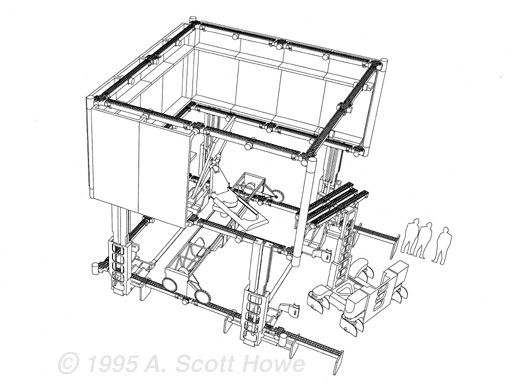
CONCEPT: The system is joint-based, where a standard joint is utilized for all connections. The building parts can be assembled or unassembled by hand without tools, and can be arranged into any configuration on any site. Since power & communication lines are integrated into the joint, they automatically connect when the joints are structurally secured. An automated construction system prepared for the kit-of-parts includes three construction robots which fold up together into a shipping container that can be delivered to remote flat sites and assemble the building system automatically for most configurations. The concepts embodied in the LDS Building System was later extended in the "Yukigen" temporary life-cycle architecture research, where the elements that make up temporary kit-of-parts buildings are tracked through the entire lifecycle of the project for production and recycle, so there is no waste at the end.
DESIGN TEAM: Project overseer: Tomohito Okudaira. Project architect & conceptual design: A. Scott Howe. Other design team member: Gregory Steffensen.
COST: Estimated 100,000-150,000 yen per square meter (approximately US$80-$120 per square foot).
DATE: Fall 1994.
STATUS: Only conceptual design steps were taken for this project. Robotic construction was simulated using CATIA kinematics and robotics modules.
Other images and animations:
robotic deploy simulation (840kb)
LDS Building System paper (PDF)
"Yukigen" presentation panel (PDF)
A.S. Howe (2003). Design Principles for Kinematic Architecture. Proceedings of the Second International Conference on Construction in the 21st Century (CITC-II). 10-12 December, 2003, Hong Kong.
A.S. Howe (2002 October). The Ultimate Construction Toy: Applying Kit-of-Parts Theory to Habitat and Vehicle Design (AIAA 2002-6116). 1st Space Architecture Symposium (SAS 2002), Houston, Texas, USA, 10-11 October 2002. Reston, Virginia, USA: American Institute of Aeronautics and Astronautics.
A.S. Howe (2000). Designing for Automated Construction. Automation in Construction 9, 3, 259-276.
A.S. Howe; I. Ishii; T. Yoshida (1999). Kit-of-parts: A review of object-oriented construction techniques. Proceedings of the International Symposium on Automation and Robotics in Construction (ISARC16). 22-24 September 1999, Madrid, Spain. London: International Association for Automation and Robotics in Construction (IAARC).
A.S. Howe (1998). A new paradigm for life-cycle management of kit-of-parts building systems. (Doctoral Dissertation, University of Michigan, 1998). University Microfilms International, No. 9909905.
A.S. Howe (1998). Jidoka Seko wo mezashita Kenchiku Design (Architectural Design Addressing Automated Construction Processes). Dai 12 Kai Kenchiku Seko Robot Symposium (12th Symposium on Architectural Construction Robotics), pp.1-8. Tokyo, Japan: Nihon Kenchiku Gakkai Kenchiku Seisan Jidoka Shoiinkai- (Architectural Institute of Japan Research Committee on Architectural Manufacturing Automation).