IF7 Field Factory
PROJECT TITLE: IMS project #96009: IF7 – Innovative and Intelligent Field Factory.
INVESTIGATORS: A. Scott Howe (Co-I), working as Plug-in Creations Architecture, LLC contractor for IMS team member Kajima Technical Research Institute (KATRI). Chabudai ("table-type") and Ohiroma ("wide slab-type") simulation team: Ulrich Dangel, Katalin Czege, Padru Kang.
FUNDING: US$6,600 (Dr. Howe's portion) funded through Kajima Technical Research Institute (KATRI), Shimizu Corporation, and Hazama Corporation.
PERIOD: Apr 2001 - Mar 2002.
ABSTRACT:
Overall IF7 project abstract:
The aim of this research is to develop technologies for automated assembly of large structures such as factory facilities. The project aims at turning the following seven dreams into reality:
- If we could build large scale objects, e.g., building, bridge and ship, in a comfortable condition somewhat like an air-conditioned factory, ...
- If we could easily build a temporary factory at site, ...
- If we could decrease construction duration half as short as that of today, ...
- If robots could assemble large components easily, ...
- If detailed information, proactive advises and guidelines in all locations of construction sites could be accessible by people for thinking or decision-making, ...
- If we could have virtual dynamic construction simulation system integrated with an intelligent planning, scheduling and performance management system, ...
- If autonomous agents could support our decision making, ...
This project will attempt to develop the technology and machinery required for automatic assembling of large structures such as buildings and ships.
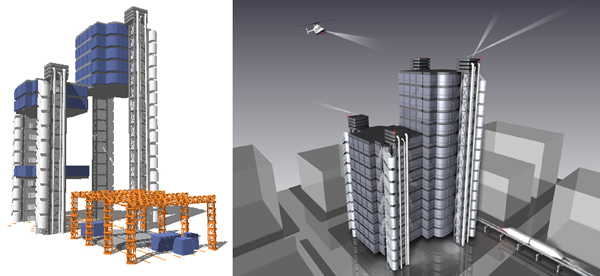
The advantages and limitations of two basic alternative assembly methods will be established: assembly of unit members such as columns and beams singly into the end structure, versus assembly of components first into blocks of appropriate size before incorporation into the final structure.
To automate component assembly, novel concepts will be applied to the development of new types of industrial robots capable of handling large, heavy members or blocks to establish the mechanics of their operation and ensure their working accuracy.
Work will also be done to develop an information management system with decision-making ability to solve problems arising at any stage of assembly, using a comprehensive database containing knowledge accumulated from experience as well as all relevant information input, from the design stage to daily variables at the building site.
A sub-system will be developed to provide timely information on potential hazards at a site and other factors that might interfere with productivity, and to identify counter measures.
Sub-abstract (managed by Dr. Howe):
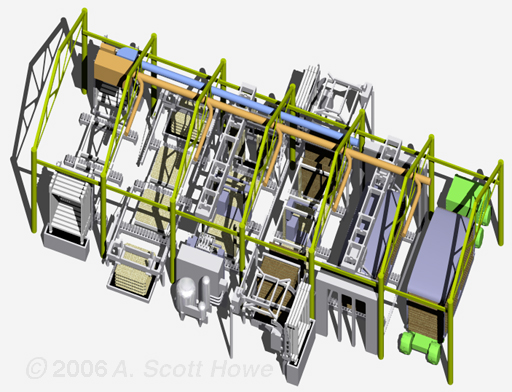
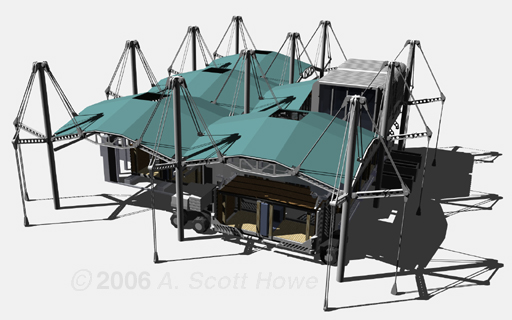
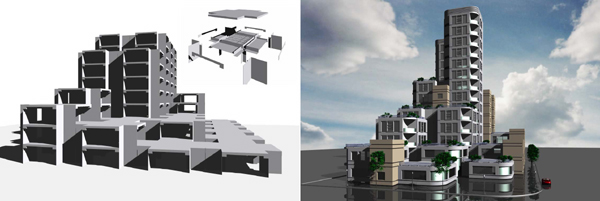
This research will develop the concept for a fully autonomous robotic assembly line field factory for prefabricated volumetric modules that will be infill for a "drawer-type" automated construction system. The work will also include simulating "table-type" and "wide slab-type" field factory concepts.
Other relevant links, images, and animations:
animation of "drawer-type" field factory (2.7mb Kajima Co. Design: Howe)
animation of "table-type" field factory (9.2mb Shimizu Co.)
animation of "wide slab-type" field factory (4mb Hazama Co.)
A.S. Howe; I. Ishii; T. Yoshida (1999). Kit-of-parts: A review of object-oriented construction techniques. Proceedings of the International Symposium on Automation and Robotics in Construction (ISARC16). 22-24 September 1999, Madrid, Spain. London: International Association for Automation and Robotics in Construction (IAARC).
Miyamoto, Ishii, Shibata, Dobashi, Howe, Yoshida, Takada, Ueno, Kunugi, Yagi, Nakata, Hatakeyama, Kigawada, Yomo, and Koga (1998). Study on assembly process for large-scale structures. Heisei 10 nendo IMS Kenkyu Seika Koen Ronbushu (1998 IMS Research Results), pp.119-122. Tokyo, Japan: Intelligent Manufacturing Systems (IMS) Center.