Remote Control Kit-of-parts / Construction Robotics
INVESTIGATORS: A. Scott Howe (PI). Advisors: James Turner, Harold Borkin, Michael Parsons, Lynn Conway.
FUNDING: Supported by Kajima Corporation, Tokyo, Japan as part of doctoral research.
PERIOD: Sep 1995 - fall 1998.
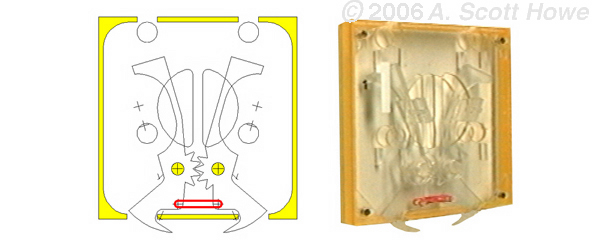
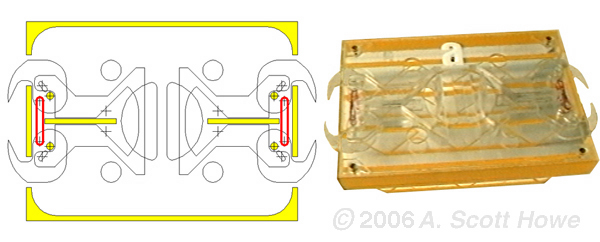
ABSTRACT: This research develops a physical kit-of-parts system that is capable of robotic assembly and remote facility management. The kit-of-parts primitives consist of a vertical (wall) panel and horizontal (floor / ceiling) panel that can be connected together in a variety of orthogonal configurations. Panels consist of anchor mechanisms that can be grasped by a robot in order to cause the panel to connect or release neighboring panels. In addition, anchor sockets are placed on a 10cm grid in x, y, and z directions, each capable of receiving and engaging anchor mechanisms belonging to other panels. The anchoring mechanisms are spring-loaded set to close by default, and will only disengage by the clasping activity of the robot manipulator. Electrical contacts and internal wiring are installed in the panels, so that physical connection will complete power and communication circuits. The system is designed in such a way that the addition of new panels into the system expands the power and control network one panel at a time. Each panel has an X-10 chip installed, set at its own address, so that signals sent through the network bus to specific addresses will enable the control of lights and other appliances built into that panel.
During the summer of 1996 a simple model building was constructed using some of the panels of the kit-of-parts system. The building was placed in the workcell of an RTX industrial robot connected to the Internet, located at the University of Michigan, so that multiple assembly and disassembly events were successfully controlled remotely from Japan and Denmark. During 1998 another simple building was constructed using the kit-of-parts panels, and connected to the Internet via a small computer located in Kajima's KI Building in Akasaka, Tokyo, Japan. Panels of the model building were incorporated with electronic chips, appliances, and internal wiring so that visitors from anywhere in the world could view a webcam pointed at the model and use its facility webpage to turn lights, and ventilation fans on and off remotely.
Other relevant links, images, and animations:
White paper discussing design for robotic assembly (PDF)
Component grasp mechanism video (1.9mb)
Robotic construction sequence video (3.8mb)
Robotic disassembly sequence video (3.6mb)



A.S. Howe (2000). Designing for Automated Construction. Automation in Construction 9, 3, 259-276.
A.S. Howe (1998). A new paradigm for life-cycle management of kit-of-parts building systems. (Doctoral Dissertation, University of Michigan, 1998). University Microfilms International, No. 9909905.
A.S. Howe (1998). Jidoka Seko wo mezashita Kenchiku Design (Architectural Design Addressing Automated Construction Processes). Dai 12 Kai Kenchiku Seko Robot Symposium (12th Symposium on Architectural Construction Robotics), pp.1-8. Tokyo, Japan: Nihon Kenchiku Gakkai Kenchiku Seisan Jidoka Shoiinkai- (Architectural Institute of Japan Research Committee on Architectural Manufacturing Automation).
A.S. Howe (1997). Designing for Automated Construction. Proceedings of the Fourteenth International symposium on Automation & Robotics in Construction, pp.167-176. Pittsburgh, Pennsylvania, USA: The Robotics Institute, Carnegie Mellon University.
A.S. Howe (1997). Designing for Automated Construction. In Y.T. Liu; J.Y. Tsou; J.H. Hou (Eds.) CAADRIA '97: Proceedings of the Second Conference on Computer Aided Architectural Design Research in Asia, pp.83-92. Taipei, Taiwan: Hu's Publisher Inc. ISBN 957-575-057-8.